✅ Práctica 27
▷ #TSCLab #TCLab #ESP32 #Arduino #Control #MACI
En el siguiente blog se presenta la vigési cuarta práctica del laboratorio de control de temperatura y velocidad de un motor.
Objetivo general:
- Enviar los valores sensados del motor del TSC-Lab por comunicación serial a Node-Red y visualizarlo.
Materiales:
- Node-Red
- TSC-Lab


Introducción:
En la presente práctica se muestra otra de las alternativas para visualizar y controlar dispositivos, la cual es Node-Red, siendo esta una herramienta de desarrollo basada en flujo para programación visual desarrollada originalmente por IBM para conectar dispositivos de hardware, API y servicios en línea como parte de Internet of Things. Para ir familiarizándose con el entorno de Node-Red se hará una conexión por comunicación seríal con el TSC-Lab.
Procedimiento:
Se necesita instalar Node-Red, a continuación se mostrará como hacerlo en un sistema operativo de Windows.
- Instalar Node.js, puede descargarlo aquí. Cualquiera de las versiones son válidas, en mi caso usé la 17.1.0 y la instalación se hace aceptando terminos como cualquier otro programa que se desea instalar. Debe seleccionar la casilla de instalar herramientas adicionales, en caso de no hacerlo se presentarán inconvenientes en el desarrollo de las prácticas.
- Abrir el Símbolo del sistema (CMD) y escribir el siguiente comando: npm install -g --unsafe-perm node-red
- Una vez que se ha realizado la instalación de manera exitosa, en el mismo CMD se debe escribir el comando: node-red. Al cabo de unos segundos aparecerá la dirección del servidor, la cual se debe copiar y pegar en cualquier navegador, tal cual como se ve en la siguiente imagen.
- Conectar el TSC-Lab y tener en cuenta el puerto que se le asignó. En caso de no saberlo puede averiguarlo en administrador de dispositivos.
- Copiar el archivo .json aquí
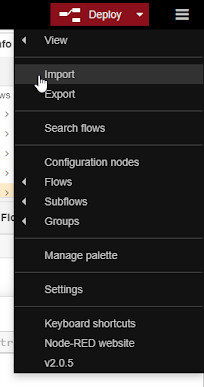
- Importar el archivo copiado en Node-Red, para ello hay que dirigirse a las tres líneas horizontales que aparece en la interfaz de Node-Red.
- Seleccionar la opción importar
- Pegar el código en el cuadro rosa que aparece.
- Una vez que pegado el código en formato json dar clic en importar
- Si aparece el recuadro que se muestra en la imagen dar clic en Import copy
- Es necesario instalar la librería de Dashboard la cual hace posible la visualización de datos. Para ello hay que dirigirse a las tres línes horizontales y dar clin en Manage palette.
- Seleccionar la pestañana install y escribir en el buscador: node-red-dashboard, para posteriormente dar clic en install. Luego instale node-red-node-serialport y finalmente de clic en close.
- En la interfaz de Node-Red debe aparecer algo como la imagen de abajo y se debe dar doble clic sobre ella.
- Seleccionar Add new serial-port
- Dar clic en el lápiz
- Escribir el nombre del puerto asignado, cambiar el Baud Rate a 115200 y dar clic en Add
- Debe aparecer algo similar a lo que se muestra en la imagen. Dar clic en Done
- Antes de continuar con la visualización, se debe cargar el código que se muestra a continuación en el TSC-Lab, el código a utilizar es una práctica de las RPM del motor y se asume que las librerías ya fueron previamente instaladas.













Repositories: https://github.com/vasanza/TSC-Lab/tree/main/Practice24
- Volviendo a la interfaz de Node-Red, hay que dar clic en Deploy para guardar y cargar todos los datos al server.
- Para visualizar los valores de RPM, se debe dar clic en la flecha que se muestra en la imagen y luego en Dashboard.
- En la pestaña del dashboard hay que dar clic en el ícono que se encierra en la siguiente imagen
- Se abrirá una ventana donde se visualiza las RPM del motor en tiempo real.




Comments
Post a Comment