✅ Práctica 25
- Github Repositories
- ▷ #TSCLab #TCLab #ESP32 #Arduino #Control #MACI
- When using this resource, please cite the original publication:
En el siguiente blog se presenta la cuadragésima segunda práctica del laboratorio de control de temperatura y velocidad de un motor.
Objetivo general:
- Obtención de datos de la Realtime Database de Firebase y almacenarlos en un archivo .csv
Materiales:
- Firebase
- Google Colab.
Introducción:
En la práctica anterior se vio como enviar los datos sensados a la Realtime Database de Firebase. Sin embargo, no se aprendió a como obtenerlos. En la presente práctica de laboratorio se mostrará a como acceder a dichos datos para posteriormente almacenarlos en un archivo .csv para que estos luego puedan ser utilizados para cualquier interés por parte del usuario.
En esta ocasión, no se utilizará el TSC-Lab, se usará Colab, también conocido como "Colaboratory", una herramienta de Google que permite programar y ejecutar Python en cualquier navegador sin la necesidad de alguna configuración, tiene muchas facilidades para compartir el contenido y es de acceso gratuito a GPUs.
Procedimiento:
Nota: se debe tener iniciado sesión en la cuenta de Google.
- Ir a Google Colab y en la ventana que aparece se debe seleccionar Nuevo cuaderno.

- En la primera celda de código se debe escribir: pip install python-firebase y luego se debe ejecutar la celda.

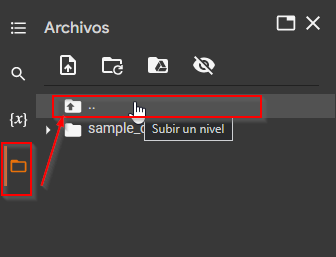
- Dirigirse a la sección de archivos y luego dar clic en la carpeta de subir nivel, tal como se ve en la imagen:

- Dirigirse a este directorio: "/usr/local/lib/python3.7/dist-packages/firebase/". Dar clic en firebase para desplegar los archivos.

- Cambiar el nombre al archivo async.py, en este caso se lo cambió a tsclab.py, para hacerlo se debe seguir las instrucciones de las siguientes imágenes:



- Dar doble clic en el archivo __init__.py par abrirlo y en la línea 3 reemplazar .async por el nombre colocado en el paso anterior, en este caso .tsclab. Luego de hacerlo se puede cerrar el archivo.


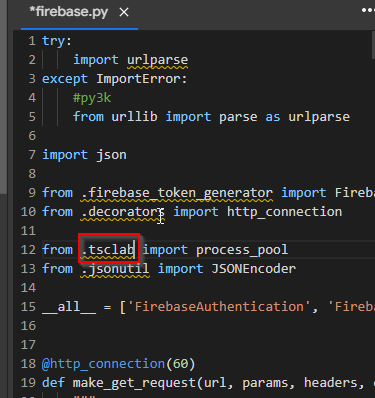
- Hacer lo mismo que el paso anterior con el archivo firebase.py en la línea 12.


- Para agregar más celdas se debe dar clic en + Código para luego completarlas con ayuda del código que se adjunta para después ejecutar cada una de ellas:











Repositories: https://github.com/vasanza/TSC-Lab/tree/main/Practice42
- Refrescar la página y dirigirse a archivos, ahí se podrá ver el archivo creado, abrirlo y hasta descargarlo.


Comments
Post a Comment